理解缝合
无人机摄影测量中地图拼接过程的幕后
通过伊恩•史密斯销售和市场@DroneDeploy
阅读第1部分,在这里.
在开始本文之前,点击这里或以查看相关的示例映射。
下面的链接地图是由南卡罗来纳州的罗比·w创建的,使用DroneDeploy一键完成。罗比的无人机拍摄了222张独立的图像,这些图像随后被自动上传到云端,然后拼接在一起形成了最终的产品——一张单一的、占地84.94英亩的地图:
正如我们在第一部分学到的,摄影测量通常更像是艺术而不是科学
有多个因素有助于确定无人机地图的质量
当你的无人机飞行它的地图路线和拍摄照片,每个图像包含特性例如:作物行、树木、建筑、设备留下的痕迹,或任何在视觉空间中明显可识别的东西。
因为这些照片是在任务期间拍摄的,所以不同特性从不同角度多次拍摄。
在DroneDeploy示例图上图中,麦田里的同心圆是理想的视觉特征
这些特征通过数学方法进行识别、匹配,并相互对齐,形成一张高分辨率的地图。
这叫做缝合。


在拼接过程中最理想的视觉特征示例:


然而,缝合并不简单。
通常,人类非常擅长模式识别

给我们一个谜题,我们可以通过比较和寻找模式来弄清楚如何把它组合在一起。即使是通过尝试和错误,我们最终也会解决所有人都能想到的问题,除了一个。
简单地考虑把一个城市街区的鸟瞰图拼成一个拼图……
在这个谜题:
- 所有的碎片都有未定义的边
- 所有的部分需要以未知的数量重叠
- 每幅图像都有不同的视角,这意味着每一件作品都必须是扭曲的以使它们匹配
现在考虑到垂直结构从每个空中角度看都是不同的。
人类几乎不可能猜中这个谜题

幸运的是,将这种密集的摄影测量缝合过程留给强大的计算机是一种奢侈,我们都可以利用它,而且现在可以很容易地获得航空数据使用各种便宜的无人机.
但事情很少是完美的,所有的图像处理软件都是完美的不平等的。想象一下,如果你根本不需要担心这些,你的数据会在云中自动处理?
如果你所有的地图数据都是在一个安全的云中拼接、存储和处理的
如果映射时条件不是绝对完美的,您不必担心。
正如我们之前所说,摄影测量是一门艺术。
像单个云这样微不足道的东西有能力完全摆脱地图拼接过程。
如果每天都是万里无云的晴天,我们就不必多说了,但飞行和绘图环境总是在变化的。这要感谢我们美妙的氛围。
大地给予,大地索取。
在条件不理想的日子里,有一个你可以信任的灵活的伴侣来把事情做好是很好的。
看看左边这张不太理想的地图的改进:

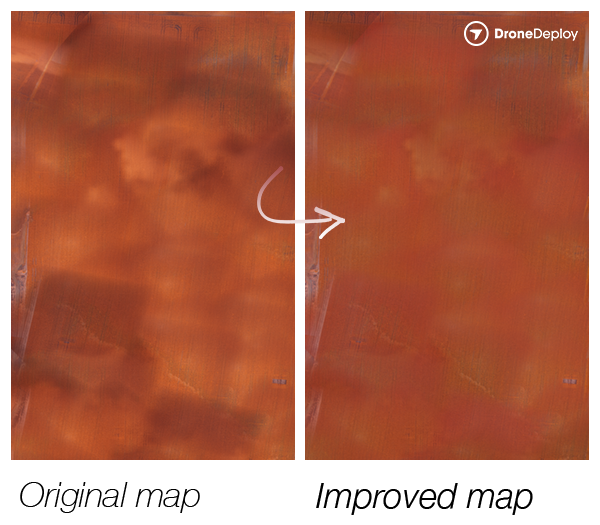
在没有任何用户交互的情况下,左侧不可用的地图被DroneDeploy自动转换为右侧可用的地图。没有额外的应用安装,下载软件更新,或试验设置。


因为DroneDeploy是基于云的,我们有独特的能力来调整设置和尝试替代处理方法,以给用户绝对最好的无人机地图可能-没有过破坏原始数据。
如果干预是必要的,DroneDeploy用户的地图可以转换成他们想要的可操作的数据片段。
是的,缝合过程并不简单,但它是一个相对容易掌握的概念。
谚语的坏数据输入,坏数据输出”在拼接方面尤其重要,但正如上面所见,有时可以减轻,如果你选择了正确的无人机测绘伙伴。
我们都知道每个行业的数据需求是不同的,但尽你所能获得最好的图像和使用最灵活的图像处理软件是获得唯一的最终产品的关键部分所有行业需要:
可靠的数据

准备好了?
登陆我们的网站www.bjtdqx.com和在这里免费注册.
你可以查看我们的最新消息无人机和设备兼容性.
